
📊 概要
19件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 8 | ██████████ 42% |
| 🚗 自動運転 | 1 | █ 5% |
| 🧠 VLA・Foundation Model | 2 | ██ 11% |
| 📄 論文紹介 | 1 | █ 5% |
| 💬 その他 | 7 | █████████ 37% |
🏆 人気トップ3
🥇 1位
| RT | 20 |
| Like | 186 |
| Views | 13000 |
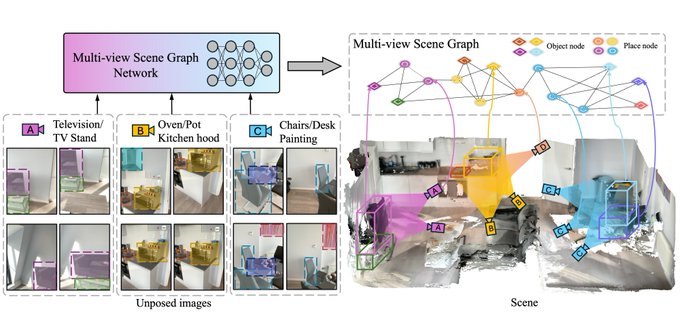
CUT3R: Continuous 3D Perception Model with Persistent State
🔗 ポストを見る
🥈 2位
| RT | 25 |
| Like | 160 |
| Views | 11000 |
GGRt: Towards Pose-free Generalizable 3D Gaussian Splatting in Real-time Generalized results on Waymo Open dataset. Left: Rendered RGB Images; Right: Rendered Depth Maps.
🔗 ポストを見る
🥉 3位
| RT | 18 |
| Like | 141 |
| Views | 6200 |
ros2_camera_lidar_fusion ROS2 Package to calculate the intrinsic and extrinsic camera calibration. Adding an easy way to fuse camera and lidars
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

8件のポスト
- CUT3R: Continuous 3D Perception Model with Persistent State (♥ 186)
- GGRt: Towards Pose-free Generalizable 3D Gaussian Splatting in Real-time Generalized results on Waymo Open dataset. Left: Rendered RGB Images; Right: … (♥ 160)
🚗 自動運転

1件のポスト
🧠 VLA・Foundation Model

2件のポスト
📄 論文紹介

1件のポスト
💬 その他
7件のポスト
- rpg_svo_pro_with_digital_twins (♥ 21)
- umber_dds UmberDDS: An experimental Rust implementation of Data Distribution Service (♥ 19)
