📊 概要
20件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 12 | ██████████ 60% |
| 🚗 自動運転 | 4 | ███ 20% |
| 🤖 ロボティクス | 2 | ██ 10% |
| 📄 論文紹介 | 1 | █ 5% |
| 🔧 OSS・ツール | 1 | █ 5% |
🏆 人気トップ3
🥇 1位
| RT | 25 |
| Like | 162 |
| Views | 9400 |
HMM-MOS Moving Object Segmentation in Point Cloud Data using Hidden Markov Models
🔗 ポストを見る
🥈 2位
| RT | 22 |
| Like | 142 |
| Views | 7900 |
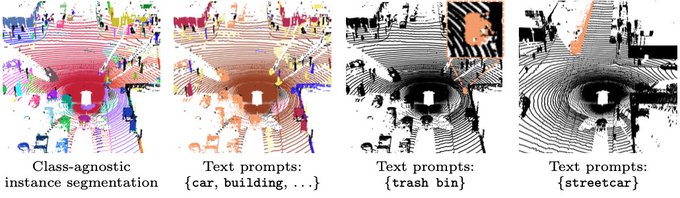
segment-anything-lidar [ECCV 2024] Better Call SAL: Towards Learning to Segment Anything in Lidar
🔗 ポストを見る
🥉 3位
| RT | 15 |
| Like | 106 |
| Views | 5100 |
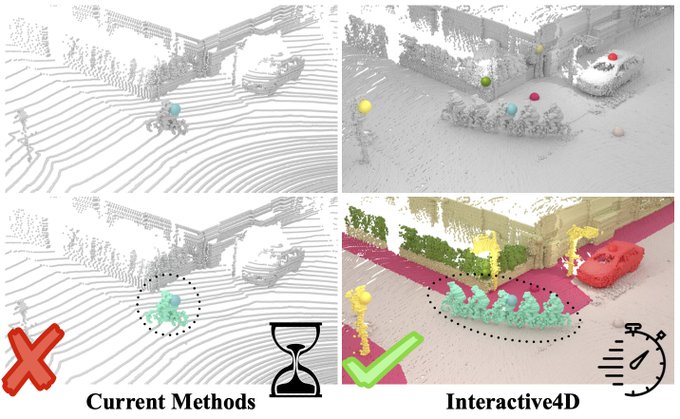
Interactive4D: Interactive 4D LiDAR Segmentation
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

12件のポスト
- HMM-MOS Moving Object Segmentation in Point Cloud Data using Hidden Markov Models (♥ 162)
- Reliable-loc Reliable LiDAR global localization using spatial verification and pose uncertainty. The implementation is based on PatchAugNet, Overlap-l… (♥ 99)
- Distributed-SOLiD-SLAM Distributed-LiDAR-SLAM: SOLiD(Global Descriptor) + DiSCo SLAM(distributed, multi-robot SLAM) (♥ 95)
🚗 自動運転

4件のポスト
🤖 ロボティクス

2件のポスト
📄 論文紹介

1件のポスト
🔧 OSS・ツール

1件のポスト