📊 概要
19件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 9 | ██████████ 47% |
| 🚗 自動運転 | 6 | ███████ 32% |
| 🤖 ロボティクス | 1 | █ 5% |
| 💬 その他 | 3 | ███ 16% |
🏆 人気トップ3
🥇 1位
| RT | 46 |
| Like | 240 |
| Views | 16000 |
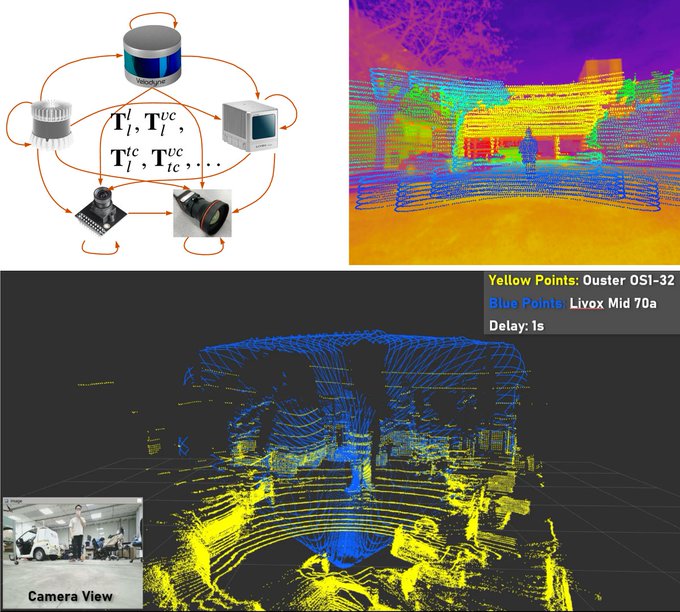
(IV 2023) LVT2Calib: Automatic and Unified Extrinsic Calibration Toolbox for Different 3D LiDAR, Visual Camera and Thermal Camera
🔗 ポストを見る
🥈 2位
| RT | 38 |
| Like | 238 |
| Views | 21000 |
DepthAnything-ROS DepthAnything-ROS is ROS2 wrapper for Depth-Anything.
🔗 ポストを見る
🥉 3位
| RT | 27 |
| Like | 209 |
| Views | 20000 |
point_lio_unilidar Point-LIO for Unitree L1 LiDAR.
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

9件のポスト
🚗 自動運転

6件のポスト

🤖 ロボティクス

1件のポスト
💬 その他
3件のポスト