
📊 2024年との比較
カテゴリ別前年比の詳細
| カテゴリ | 2024年 | 2025年 | 変化 | |:---------|--------:|--------:|-----:| | 🏗️ 3D再構成・SLAM | 106 | 119 | +12% | | 🚗 自動運転 | 50 | 32 | -36% | | 🤖 ロボティクス | 25 | 18 | -28% | | 🧠 VLA・Foundation Model | 4 | 13 | +225% | | 📄 論文紹介 | 11 | 14 | +27% | | 🔧 OSS・ツール | 5 | 2 | -60% | | 💬 その他 | 35 | 29 | -17% |📅 月別カテゴリ推移
月ごとのカテゴリ分布の変化です。
| 月 | 🏗️ | 🚗 | 🤖 | 🧠 | 📄 | 🔧 | 💬 | 計 | 平均♥ |
|---|---|---|---|---|---|---|---|---|---|
| 1月 | 10 | 4 | 1 | 1 | 2 | · | 2 | 20 | 60 |
| 2月 | 8 | 1 | · | 2 | 1 | · | 7 | 19 | 77 |
| 3月 | 11 | 4 | 1 | · | 1 | · | 3 | 20 | 72 |
| 4月 | 11 | 6 | · | · | 3 | · | · | 20 | 92 |
| 5月 | 10 | 3 | 3 | · | · | · | 1 | 17 | 72 |
| 6月 | 7 | · | 3 | 2 | · | · | 3 | 15 | 80 |
| 7月 | 8 | 3 | 1 | 3 | 1 | · | 4 | 20 | 97 |
| 8月 | 8 | 2 | 2 | 2 | 2 | 1 | 2 | 19 | 67 |
| 9月 | 10 | 4 | 2 | 1 | 3 | · | · | 20 | 138 |
| 10月 | 10 | 2 | 1 | · | · | · | 4 | 17 | 84 |
| 11月 | 14 | 2 | 3 | · | 1 | · | · | 20 | 131 |
| 12月 | 12 | 1 | 1 | 2 | · | 1 | 3 | 20 | 104 |
🏅 カテゴリ別ベスト
各カテゴリで最もいいねが多かったポストです。
🏆 年間トップ10
1位 📄
♥ 533 / RT 70 / 33,000 views — 2025-09-27
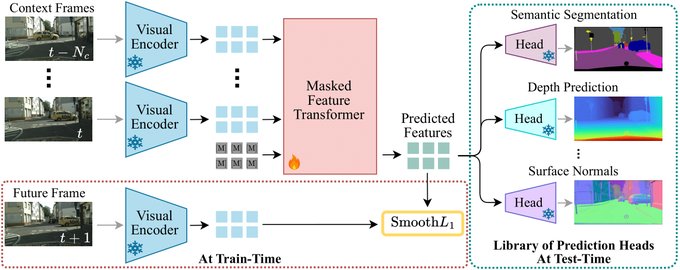
[NeurIPS 2025] Official Implementation of DINO-Foresight: Looking into the Future with DINO
🔗 ポストを見る
2位 🏗️
♥ 416 / RT 49 / 18,000 views — 2025-11-20
[CVPR 2025 Highlight] SLAM3R: Real-Time Dense Scene Reconstruction from Monocular RGB Videos SLAM3R is a real-time dense scene reconstruction system that regresses 3D points from video frames using fe…
🔗 ポストを見る
3位 🚗
♥ 395 / RT 69 / 22,000 views — 2025-09-08
RKO_LIO - LiDAR-Inertial Odometry Without Sensor-Specific Modelling Four different platforms, four different environments, one odometry system
🔗 ポストを見る
4位 🏗️
♥ 316 / RT 42 / 14,000 views — 2025-11-21
[RA-L 2025] ActiveSplat: High-Fidelity Scene Reconstruction through Active Gaussian Splatting ActiveSplat enables the agent to explore the environment autonomously to build a 3D map on the fly. The in…
🔗 ポストを見る
5位 🧠
♥ 304 / RT 50 / 14,000 views — 2025-06-28
NVlabs/PyCuVSLAM Highly accurate and efficient VSLAM system for Python > PyCuVSLAM is the official Python wrapper around the cuVSLAM visual-inertial SLAM (Simultaneous Localization And Mapping) softwa…
🔗 ポストを見る
6位 🏗️

♥ 278 / RT 32 / 16,000 views — 2025-12-31
3D-RE-GEN 3D Reconstruction of Indoor Scenes with a Generative Framework We propose single-image 3D scene reconstruction for producing complete, editable scenes from a single photograph. Our method re…
🔗 ポストを見る
7位 🏗️
♥ 270 / RT 45 / 18,000 views — 2025-03-27
ge-drive-visualizer Visualization of vehicle position and pose estimation in Google Earth visualization/localization/lidar/gnss/googleearth
🔗 ポストを見る
8位 🧠
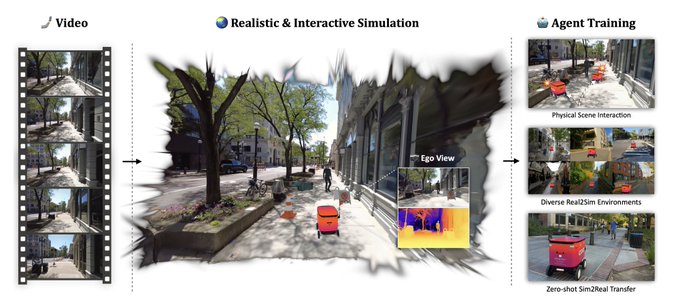
♥ 257 / RT 32 / 15,000 views — 2025-09-10
[CVPR 25] Vid2Sim: Realistic and Interactive Simulation from Video for Urban Navigation Vid2Sim is a novel framework that converts monocular videos into photorealistic and physically interactive simul…
🔗 ポストを見る
9位 🏗️
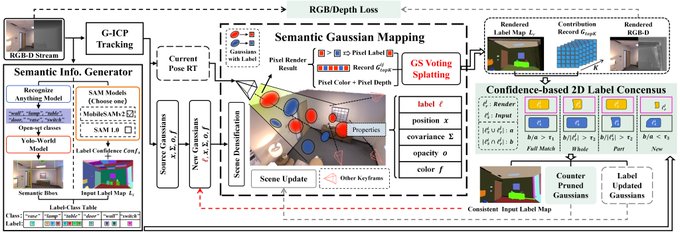
♥ 256 / RT 49 / 14,000 views — 2025-06-12
ICRA2025: OpenGS-SLAM: Open-Set Dense Semantic SLAM with 3D Gaussian Splatting for Object-Level Scene Understanding
🔗 ポストを見る
10位 🏗️
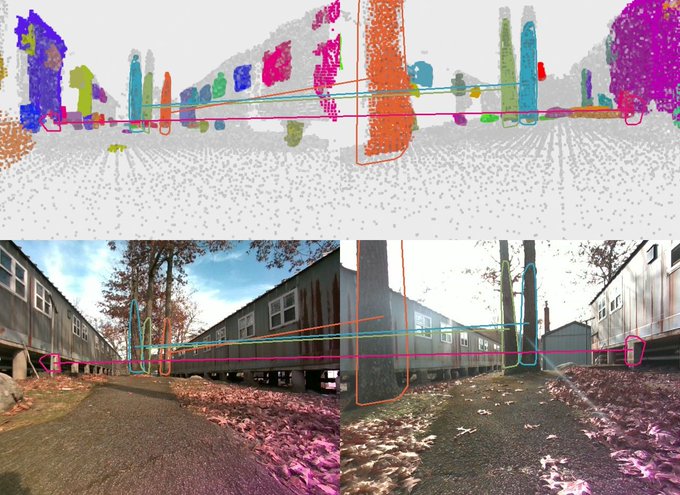
♥ 241 / RT 52 / 12,000 views — 2025-07-25
ROMAN(Robust Object Map Alignment Anywhere) a view-invariant global localization method that maps open-set objects and uses the geometry, shape, and semantics of objects to find the transformation bet…
🔗 ポストを見る