📊 概要
20件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 14 | ██████████ 70% |
| 🚗 自動運転 | 2 | █ 10% |
| 🤖 ロボティクス | 3 | ██ 15% |
| 📄 論文紹介 | 1 | █ 5% |
🏆 人気トップ3
🥇 1位
| RT | 49 |
| Like | 416 |
| Views | 18000 |
[CVPR 2025 Highlight] SLAM3R: Real-Time Dense Scene Reconstruction from Monocular RGB Videos SLAM3R is a real-time dense scene reconstruction system that regresses 3D points from video frames using feed-forward neural networks, without explicitly
🔗 ポストを見る
🥈 2位
| RT | 42 |
| Like | 316 |
| Views | 14000 |
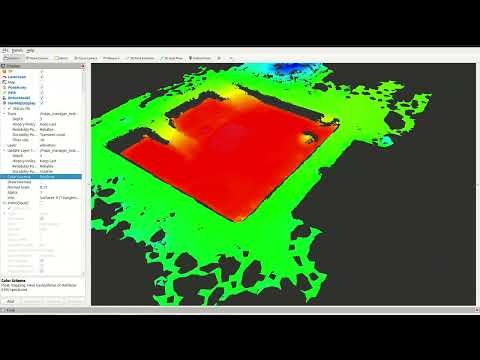
[RA-L 2025] ActiveSplat: High-Fidelity Scene Reconstruction through Active Gaussian Splatting ActiveSplat enables the agent to explore the environment autonomously to build a 3D map on the fly. The integration of a Gaussian map and a Voronoi graph as…
🔗 ポストを見る
🥉 3位
| RT | 33 |
| Like | 224 |
| Views | 11000 |
NavMap NavMap is an open-source C++ and ROS 2 library for representing navigable surfaces for mobile robot navigation and localization. Unlike classic grid-based maps, NavMap stores the environment as triangular meshes (NavCels), enabling efficient q…
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

14件のポスト
- [CVPR 2025 Highlight] SLAM3R: Real-Time Dense Scene Reconstruction from Monocular RGB Videos SLAM3R is a real-time dense scene reconstruction system t… (♥ 416)
- [RA-L 2025] ActiveSplat: High-Fidelity Scene Reconstruction through Active Gaussian Splatting ActiveSplat enables the agent to explore the environment… (♥ 316)

🚗 自動運転

2件のポスト
🤖 ロボティクス

3件のポスト
📄 論文紹介

1件のポスト