
📊 概要
17件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 10 | ██████████ 59% |
| 🚗 自動運転 | 2 | ██ 12% |
| 🤖 ロボティクス | 1 | █ 6% |
| 💬 その他 | 4 | ████ 24% |
🏆 人気トップ3
🥇 1位
| RT | 22 |
| Like | 203 |
| Views | 11000 |
TTT3R: 3D Reconstruction as Test-Time Training TL;DR: A simple state update rule to enhance length generalization for CUT3R.
🔗 ポストを見る
🥈 2位
| RT | 25 |
| Like | 194 |
| Views | 8700 |
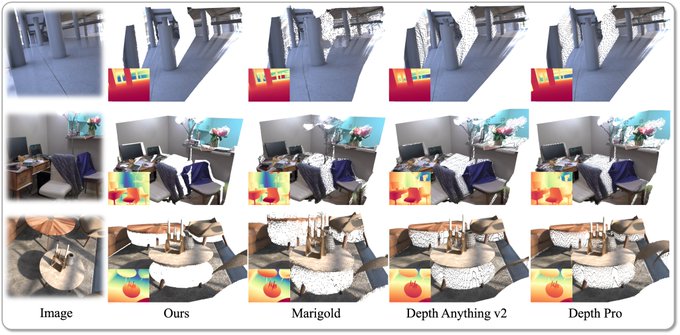
[NeurIPS 2025] Pixel-Perfect Depth This work presents Pixel-Perfect Depth, a monocular depth estimation model with pixel-space diffusion transformers. Compared to existing discriminative and generative models, its estimated depth maps can produce
🔗 ポストを見る
🥉 3位
| RT | 23 |
| Like | 191 |
| Views | 10000 |
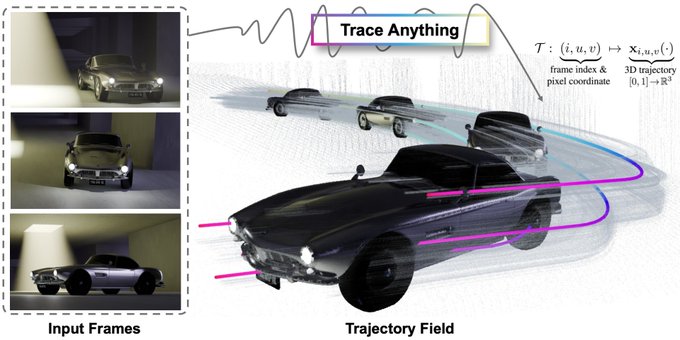
Trace Anything: Representing Any Video in 4D via Trajectory Fields
🔗 ポストを見る
📂 カテゴリ別ハイライト
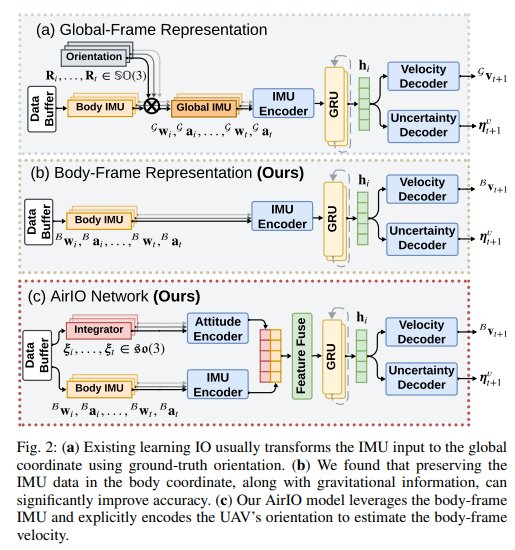
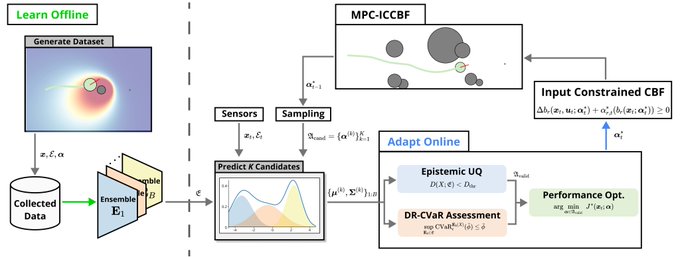
🏗️ 3D再構成・SLAM

10件のポスト
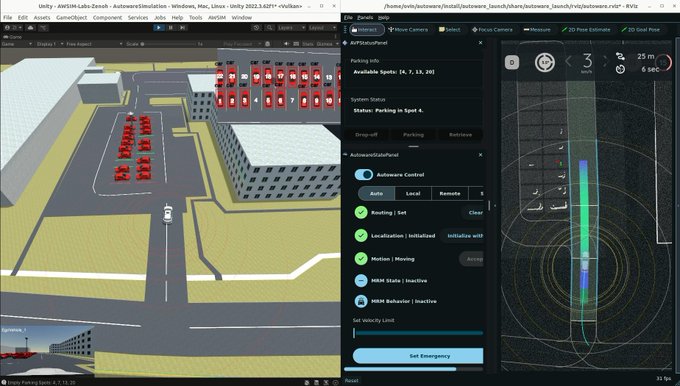
🚗 自動運転

2件のポスト
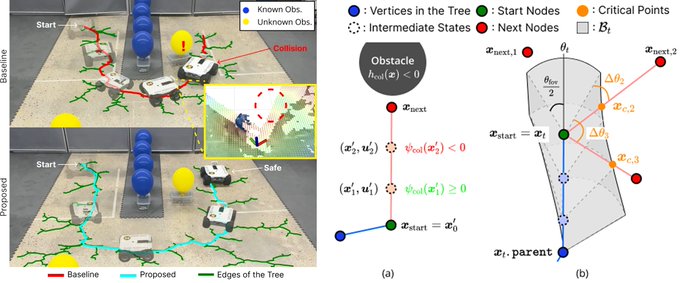
🤖 ロボティクス

1件のポスト
💬 その他
4件のポスト
- 国際学会の時期になるとフォロワー数が伸びる (♥ 2)