
📊 概要
20件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 10 | ██████████ 50% |
| 🚗 自動運転 | 4 | ████ 20% |
| 🤖 ロボティクス | 2 | ██ 10% |
| 🧠 VLA・Foundation Model | 1 | █ 5% |
| 📄 論文紹介 | 3 | ███ 15% |
🏆 人気トップ3
🥇 1位
| RT | 70 |
| Like | 533 |
| Views | 33000 |
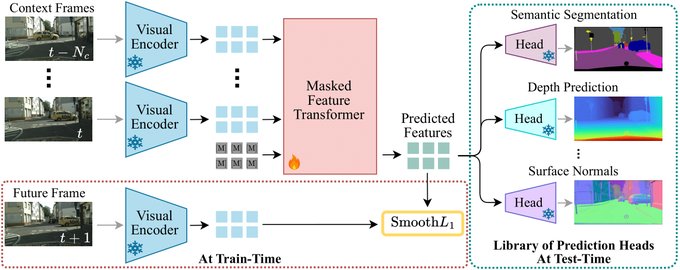
[NeurIPS 2025] Official Implementation of DINO-Foresight: Looking into the Future with DINO
🔗 ポストを見る
🥈 2位
| RT | 69 |
| Like | 395 |
| Views | 22000 |
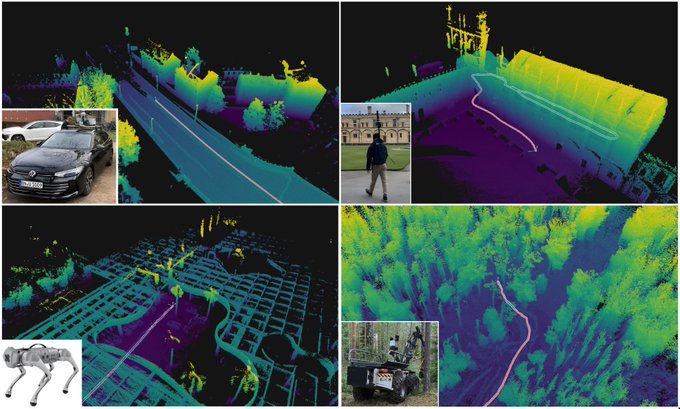
RKO_LIO - LiDAR-Inertial Odometry Without Sensor-Specific Modelling Four different platforms, four different environments, one odometry system
🔗 ポストを見る
🥉 3位
| RT | 32 |
| Like | 257 |
| Views | 15000 |
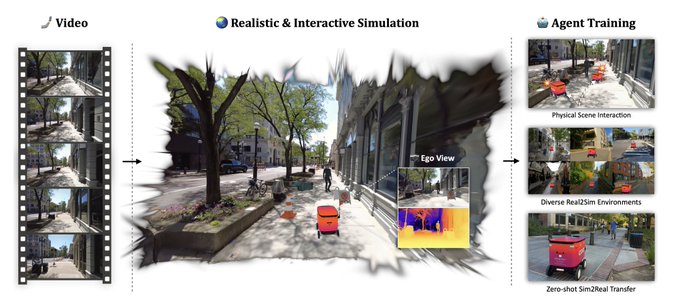
[CVPR 25] Vid2Sim: Realistic and Interactive Simulation from Video for Urban Navigation Vid2Sim is a novel framework that converts monocular videos into photorealistic and physically interactive simulation environments for training embodied agents wi…
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

10件のポスト
- ViSTA-SLAM: Visual SLAM with Symmetric Two-view Association ViSTA-SLAM is a real-time monocular dense SLAM pipeline that combines a Symmetric Two-view… (♥ 180)
- ORB-SLAM-Python ORB_SLAM3 Python Bindings (♥ 155)
- [CoRL 2025] ActLoc: Learning to Localize on the Move via Active Viewpoint Selection > We present ActLoc, a learning-based approach for active viewpoin… (♥ 150)
🚗 自動運転

4件のポスト
- DWPP: Dynamic Window Pure Pursuit for Robot Path Tracking Considering Velocity and Acceleration Constraints (♥ 41)
- gnss-lidar-dataprocessing Processes gnss/lidar data from raw files PCAP conversion files (PCAPtoROS) can be built in a ros2 workspace. You can just pu… (♥ 26)
🤖 ロボティクス

2件のポスト
🧠 VLA・Foundation Model

1件のポスト
📄 論文紹介

3件のポスト
- [NeurIPS 2025 (Spotlight)] The implementation for the paper “4DGT Learning a 4D Gaussian Transformer Using Real-World Monocular Videos” (♥ 224)
- Awesome-Image-Matching Bibliographic list for papers of image matching (♥ 48)