
📊 概要
15件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 7 | ██████████ 47% |
| 🤖 ロボティクス | 3 | ████ 20% |
| 🧠 VLA・Foundation Model | 2 | ███ 13% |
| 💬 その他 | 3 | ████ 20% |
🏆 人気トップ3
🥇 1位
| RT | 50 |
| Like | 304 |
| Views | 14000 |
NVlabs/PyCuVSLAM Highly accurate and efficient VSLAM system for Python > PyCuVSLAM is the official Python wrapper around the cuVSLAM visual-inertial SLAM (Simultaneous Localization And Mapping) software package developed by NVIDIA. It is a highly acc…
🔗 ポストを見る
🥈 2位
| RT | 49 |
| Like | 256 |
| Views | 14000 |
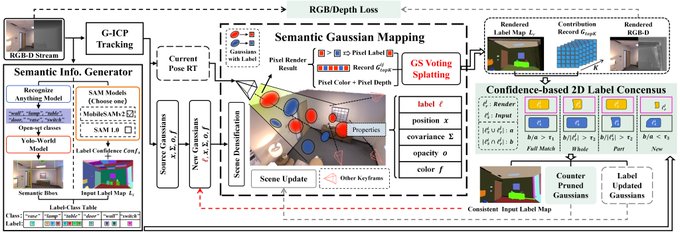
ICRA2025: OpenGS-SLAM: Open-Set Dense Semantic SLAM with 3D Gaussian Splatting for Object-Level Scene Understanding
🔗 ポストを見る
🥉 3位
| RT | 29 |
| Like | 166 |
| Views | 8400 |
Splat-LOAM 2D Gaussian Splatting based LiDAR Odometry And Mapping
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

7件のポスト

🤖 ロボティクス

3件のポスト
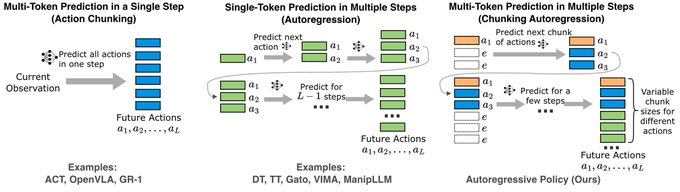
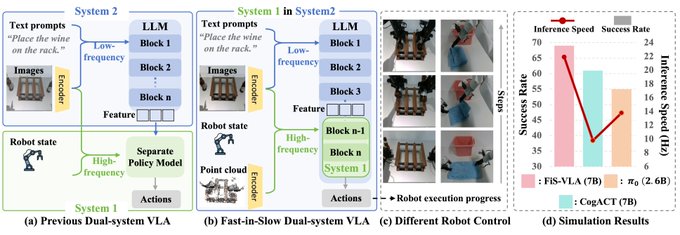
🧠 VLA・Foundation Model

2件のポスト
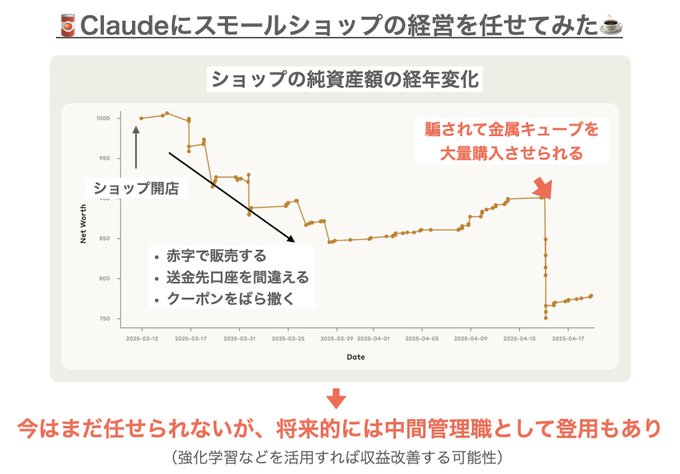
💬 その他
3件のポスト
- 万博行きたくなってきたな 10月13日までか (♥ 3)