📊 概要
20件のポスト(リプライ除く)を3カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 11 | ██████████ 55% |
| 🚗 自動運転 | 6 | █████ 30% |
| 📄 論文紹介 | 3 | ███ 15% |
🏆 人気トップ3
🥇 1位
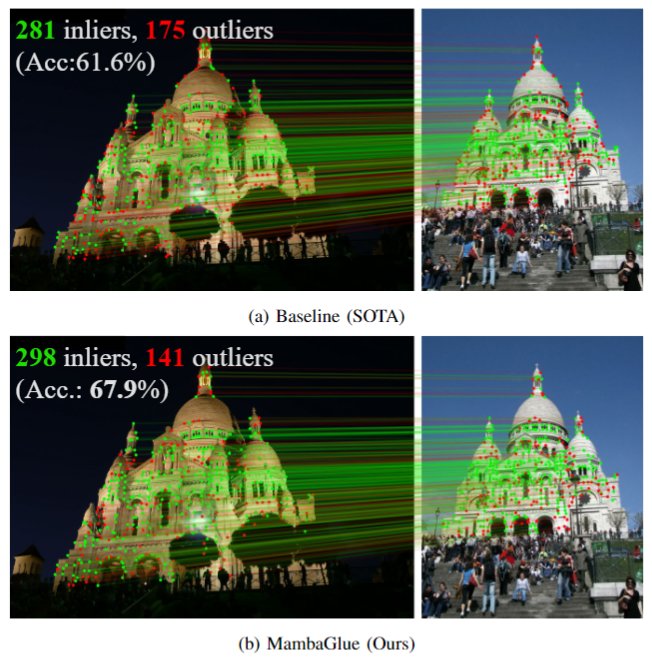
| RT | 46 |
| Like | 232 |
| Views | 11000 |
MambaGlue: Fast and Robust Local Feature Matching With Mamba @ ICRA’25 > MambaGlue is a hybrid neural network combining the Mamba and the Transformer architectures to match local features.
🔗 ポストを見る
🥈 2位
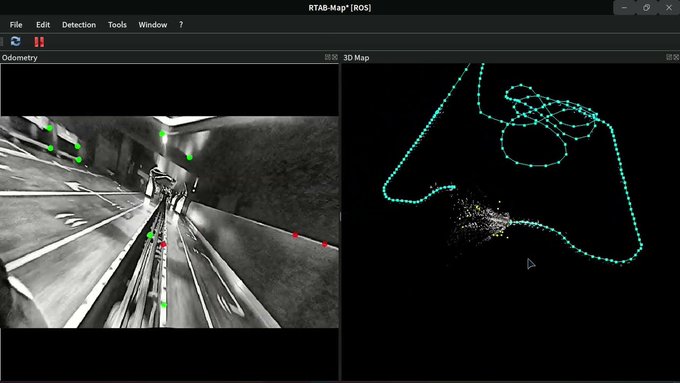
| RT | 32 |
| Like | 210 |
| Views | 13000 |
Roller Coaster SLAM Dataset The world’s first roller coaster SLAM dataset
🔗 ポストを見る
🥉 3位
| RT | 29 |
| Like | 187 |
| Views | 11000 |
[CVPR 2025] Any6D: Model-free 6D Pose Estimation of Novel Objects
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

11件のポスト
🚗 自動運転

6件のポスト
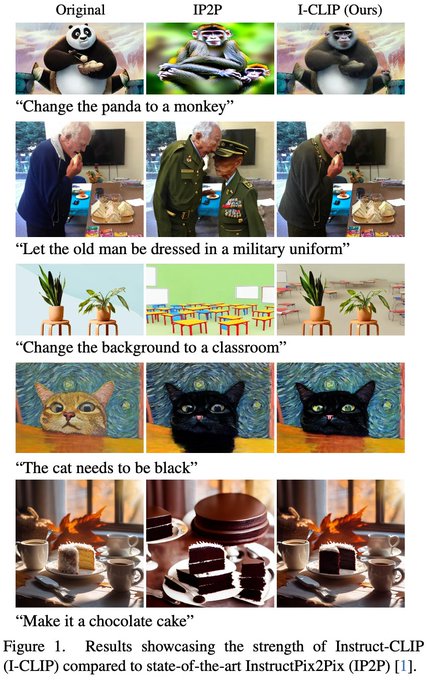
📄 論文紹介

3件のポスト
- [CVPR 2025] Any6D: Model-free 6D Pose Estimation of Novel Objects (♥ 187)
- awesome-rgbd-datasets This repository contains information for the paper “A Survey on RGB-D Datasets” and is a collaborative initiative to update the … (♥ 53)