📊 概要
20件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 9 | ██████████ 45% |
| 🚗 自動運転 | 4 | ████ 20% |
| 🤖 ロボティクス | 2 | ██ 10% |
| 🔧 OSS・ツール | 2 | ██ 10% |
| 💬 その他 | 3 | ███ 15% |
🏆 人気トップ3
🥇 1位
| RT | 100 |
| Like | 674 |
| Views | 51000 |
AutoCarROS2 A virtual simulation platform for autonomous vehicle sensing, mapping, control and behaviour methods using ROS 2 and Gazebo.
🔗 ポストを見る
🥈 2位
| RT | 66 |
| Like | 344 |
| Views | 15000 |
YOLOs-CPP A high-performance C++ headers for real-time object detection using YOLO models, leveraging ONNX Runtime and OpenCV for seamless integration. Supports multiple YOLO versions (v5, v7, v8, v10, v11) with optimized inference on CPU and GPU.
🔗 ポストを見る
🥉 3位
| RT | 18 |
| Like | 123 |
| Views | 6600 |
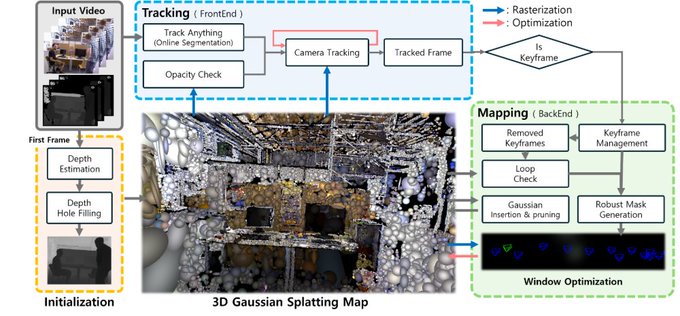
DGS-SLAM: Gaussian Splatting SLAM in Dynamic Environments The DGS-SLAM pipeline incorporates Gaussian Splatting, robust filtering, keyframe management, and loop-aware optimization. Below is a visual representation of the process:
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

9件のポスト
🚗 自動運転

4件のポスト
- YOLOs-CPP A high-performance C++ headers for real-time object detection using YOLO models, leveraging ONNX Runtime and OpenCV for seamless integration… (♥ 344)
- ERPoT: Effective and Reliable Pose Tracking for Mobile Robots Based on Lightweight and Compact Polygon Maps (♥ 65)
- InGM-LIO: A Multiscale Gaussian Model-Based LiDAR-Inertial Odometry Using Invariant Kalman Filtering (♥ 41)
🤖 ロボティクス

2件のポスト
- ros2-websocket-proxy A proxy for seamless communication between ROS 2 topics and WebSocket clients. (♥ 51)
- DRL-DroneNavigation Deep Reinforcement Learning Simulator and Algorithms for optimal pathfinding (♥ 45)
🔧 OSS・ツール

2件のポスト
💬 その他
3件のポスト