
📊 概要
20件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 11 | ██████████ 55% |
| 🚗 自動運転 | 5 | █████ 25% |
| 🤖 ロボティクス | 1 | █ 5% |
| 💬 その他 | 3 | ███ 15% |
🏆 人気トップ3
🥇 1位
| RT | 170 |
| Like | 999 |
| Views | 69000 |
ge-gnss-visibility GNSS satellite visibility simulation from Google Earth
🔗 ポストを見る
🥈 2位
| RT | 33 |
| Like | 213 |
| Views | 7300 |
Graph-Based_SLAM-Aware_Exploration [IEEE RA-L 2024]: Graph-based SLAM-Aware Exploration with Prior Topo-Metric Information.
🔗 ポストを見る
🥉 3位
| RT | 29 |
| Like | 212 |
| Views | 10000 |
Awesome-LiDAR-Mapping Collection of Papers with Codes: LiDAR Odometry/SLAM, Dynamic Object Removal, and Multiple Map Merging
🔗 ポストを見る
📂 カテゴリ別ハイライト
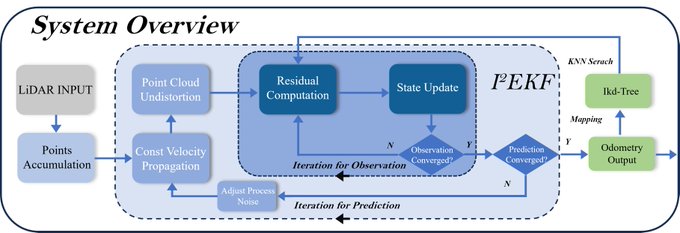
🏗️ 3D再構成・SLAM

11件のポスト

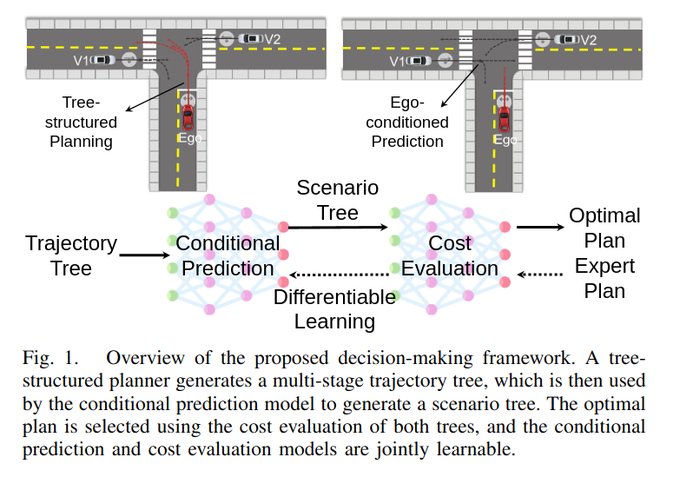
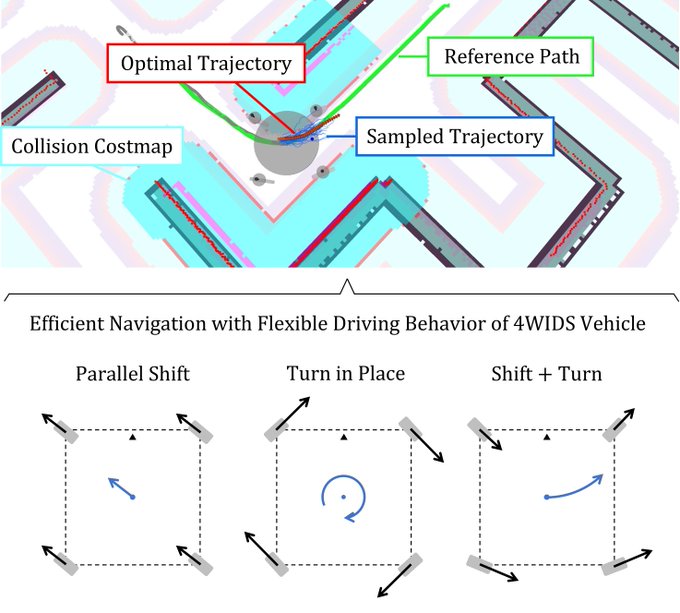
🚗 自動運転

5件のポスト
🤖 ロボティクス

1件のポスト
💬 その他
3件のポスト
