📊 概要
20件のポスト(リプライ除く)を6カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 11 | ██████████ 55% |
| 🚗 自動運転 | 1 | █ 5% |
| 🤖 ロボティクス | 2 | ██ 10% |
| 📄 論文紹介 | 1 | █ 5% |
| 🔧 OSS・ツール | 1 | █ 5% |
| 💬 その他 | 4 | ████ 20% |
🏆 人気トップ3
🥇 1位
| RT | 47 |
| Like | 263 |
| Views | 16000 |
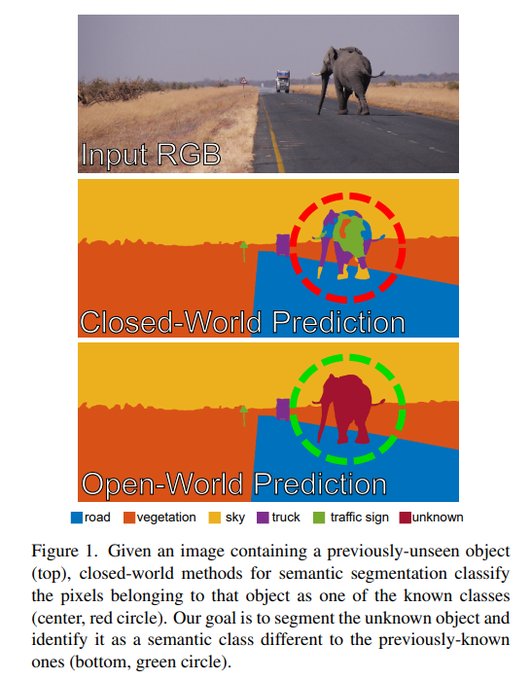
a novel approach for semantic segmentation in open-world settings, where unknown objects not seen during training must be identified. ContMAV [CVPR2024] Open-world Semantic Segmentation Including Class Similarity
🔗 ポストを見る
🥈 2位
| RT | 38 |
| Like | 208 |
| Views | 11000 |
ORB-SLAM3-ROS2-Docker This repository contains a full wrapper class for running ORB-SLAM3 on a docker container with ROS2 Humble with Ubuntu 22.04.
🔗 ポストを見る
🥉 3位
| RT | 27 |
| Like | 200 |
| Views | 17000 |
Self-supervised Monocular Depth Estimation: Let’s Talk About The Weather
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

11件のポスト
- ORB-SLAM3-ROS2-Docker This repository contains a full wrapper class for running ORB-SLAM3 on a docker container with ROS2 Humble with Ubuntu 22.04. (♥ 208)
- Self-supervised Monocular Depth Estimation: Let’s Talk About The Weather (♥ 200)

- Active SLAM: A Review on Last Decade (♥ 104)
- NeRF On-the-go Exploiting Uncertainty for Distractor-free NeRFs in the Wild(CVPR 2024) > NeRF On-the-go enables novel view synthesis in in-the-wild sc… (♥ 100)
🚗 自動運転

1件のポスト

🤖 ロボティクス

2件のポスト
📄 論文紹介

1件のポスト
🔧 OSS・ツール

1件のポスト
- ポストするOSSネタが尽きそう 🙃 (♥ 4)
💬 その他
4件のポスト
- Stein Variational Gradient Descentのざっくり理解 (♥ 181)
- ACE Zero ACE0 is a learning-based structure-from-motion approach that estimates camera parameters of sets of images by learning a multi-view consisten… (♥ 120)
- sensor_trigger ROS node for triggering cameras using GPIO on Jetson (targeting ROSCubeX, but easily adaptable to other platforms) (♥ 25)