📊 概要
20件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 8 | ██████████ 40% |
| 🚗 自動運転 | 4 | █████ 20% |
| 🤖 ロボティクス | 4 | █████ 20% |
| 🧠 VLA・Foundation Model | 1 | █ 5% |
| 💬 その他 | 3 | ████ 15% |
🏆 人気トップ3
🥇 1位
| RT | 65 |
| Like | 355 |
| Views | 33000 |
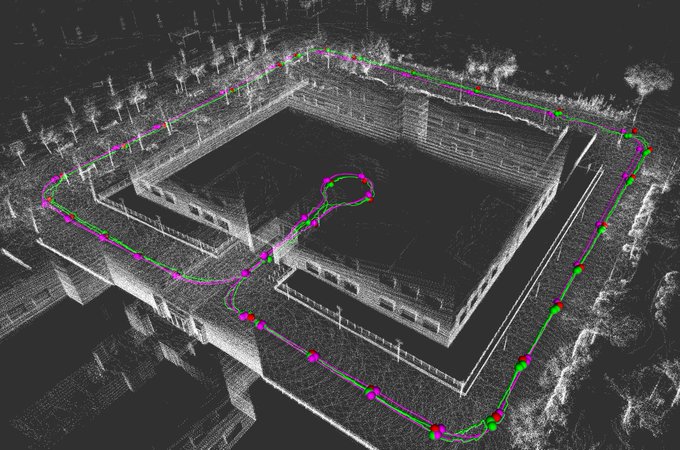
Representing 3D sparse map points and lines for camera relocalization
🔗 ポストを見る
🥈 2位
| RT | 32 |
| Like | 223 |
| Views | 13000 |
NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM(3DV 2024 Oral)
🔗 ポストを見る
🥉 3位
| RT | 31 |
| Like | 173 |
| Views | 9300 |
Loopy-SLAM: Dense Neural SLAM with Loop Closures (CVPR2024)
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

8件のポスト
- Representing 3D sparse map points and lines for camera relocalization (♥ 355)
- NICER-SLAM: Neural Implicit Scene Encoding for RGB SLAM(3DV 2024 Oral) (♥ 223)
- Loopy-SLAM: Dense Neural SLAM with Loop Closures (CVPR2024) (♥ 173)
- BAD-Gaussians: Bundle-Adjusted Deblur Gaussian Splatting Left: BAD-Gaussians deblured novel-view renderings; Right: Input images. (♥ 120)
- RGBD GS-ICP SLAM (♥ 96)
🚗 自動運転

4件のポスト
- ipad-lidar2ros Publish iPad Pro LiDAR data & more in ROS 2 - source code & assets only (♥ 109)
- SMERF: Augmenting Lane Perception and Topology Understanding with Standard Definition Navigation Maps (♥ 74)
🤖 ロボティクス

4件のポスト
🧠 VLA・Foundation Model

1件のポスト
💬 その他
3件のポスト
- X-AnyLabeling Effortless data labeling with AI support from Segment Anything and other awesome models. (♥ 121)
- Livox_Color_View_And_Mpping A module to color the Livox Frame and FASTLIO2’s map, inorder to checkout our extrinsicT ~ (♥ 48)