📊 概要
20件のポスト(リプライ除く)を5カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 13 | ██████████ 65% |
| 🚗 自動運転 | 1 | █ 5% |
| 🤖 ロボティクス | 2 | ██ 10% |
| 📄 論文紹介 | 2 | ██ 10% |
| 💬 その他 | 2 | ██ 10% |
🏆 人気トップ3
🥇 1位
| RT | 36 |
| Like | 185 |
| Views | 10000 |
Fuzzy Metaballs+ use 3D Gaussians for differentiable rendering, integrating optical flow and producing watertight meshes. These techniques ensure speedy, reliable reconstructions on both GPU and CPU.
🔗 ポストを見る
🥈 2位

| RT | 23 |
| Like | 111 |
| Views | 6000 |
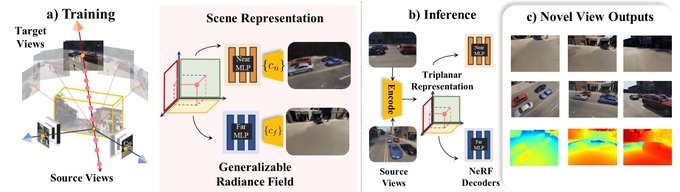
S-NeRF is a system that uses NeRFs to synthesize expansive and realistic street views for applications like autonomous driving simulation, robotics, and augmented reality. S-NeRF: Neural Radiance Fields for Street Views
🔗 ポストを見る
🥉 3位
| RT | 13 |
| Like | 76 |
| Views | 5700 |
Most Vision-and-Language Navigation methods use recurrent states, topological maps, or top-down semantic maps for memory. The new approach uses Grid Memory Map for spatial representation and emphasizes visual cues in each grid. GridMM
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

13件のポスト
🚗 自動運転

1件のポスト
🤖 ロボティクス

2件のポスト
📄 論文紹介

2件のポスト
💬 その他
2件のポスト