📊 概要
20件のポスト(リプライ除く)を4カテゴリに分類しました。
| カテゴリ | 件数 | 割合 |
|---|---|---|
| 🏗️ 3D再構成・SLAM | 16 | ██████████ 80% |
| 🚗 自動運転 | 2 | █ 10% |
| 📄 論文紹介 | 1 | █ 5% |
| 💬 その他 | 1 | █ 5% |
🏆 人気トップ3
🥇 1位
| RT | 35 |
| Like | 124 |
| Views | 11000 |
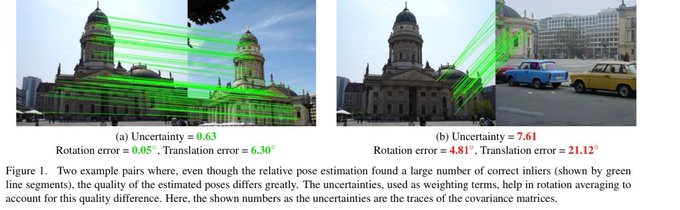
This paper revisits rotation averaging in Structure-from-Motion, proposing to model noise by propagating uncertainty from point correspondences, and integrates MAGSAC loss, improving accuracy.[CVPR 2023] GlobalSfMpy
🔗 ポストを見る
🥈 2位
| RT | 29 |
| Like | 94 |
| Views | 12000 |
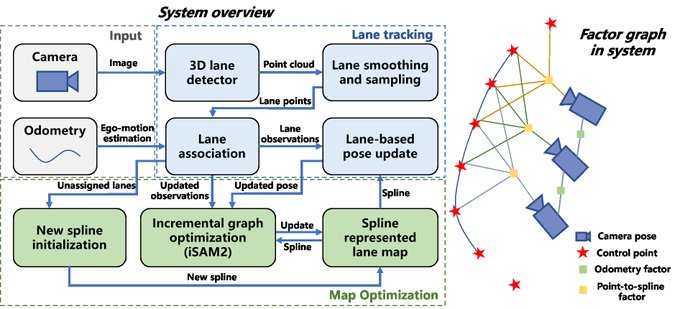
MonoLaM is a real-time lane mapping algorithm using a monocular camera. It combines 3D detection, lane association, Catmull-Rom Spline parameterization, and optimization to accurately map lanes.(IROS 2023)
🔗 ポストを見る
🥉 3位
| RT | 17 |
| Like | 85 |
| Views | 7500 |
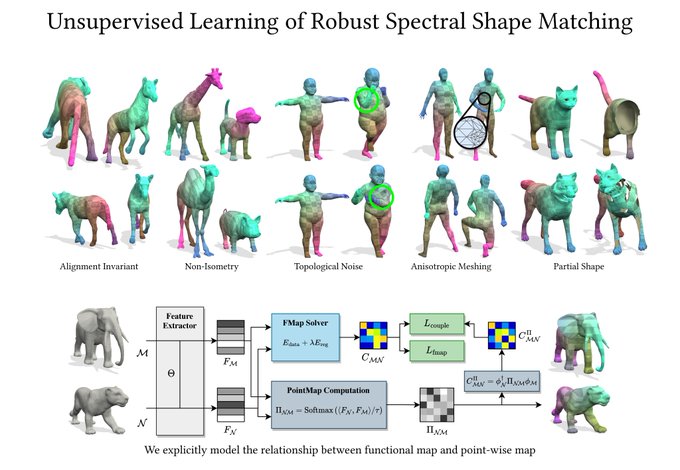
An innovative, unsupervised approach improves 3D shape matching by obtaining precise point-wise maps from deep functional maps, effectively handling complex and noisy shapes Unsupervised Learning of Robust Spectral Shape Matching (SIGGRAPH/TOG 2023)
🔗 ポストを見る
📂 カテゴリ別ハイライト
🏗️ 3D再構成・SLAM

16件のポスト
🚗 自動運転

2件のポスト
📄 論文紹介

1件のポスト
💬 その他
1件のポスト