3DGS koide first light (2026-06-06)
docs/research/3dgs-postprocess-map-design.md の M1 first light を、ローカルの
demo_data/koide_lidar_camera_calib(Livox + 単眼カメラ同期 bag)で実走した記録。
実 bag → SLAM → posed 画像 → 3DGS .ply の全鎖が通ったことの確認。
再現: bash scripts/run_koide_3dgs_firstlight.sh
パイプライン
demo_data/koide_lidar_camera_calib/livox/rosbag2_2023_03_09-13_42_46 (15.6s)
│
├─[1] lidarslam frontend (mid360 noimu) → traj_map_livox_frame.tum (30 poses)
├─[2] extract_posed_images.py → 30 posed images + transforms.json
│ --time-offset auto (camera→/livox/points クロック整合: 21.88s)
│ --extrinsic 近似 frame-convention (並進ゼロ)
└─[3] train_gsplat.py (gsplat, 60k init, 1500 iter) → point_cloud.ply (4.1MB)
結果(3段階の品質向上)
| 指標 | random init | + LiDAR-primed | + densification |
|---|---|---|---|
| 学習 photometric MSE | 0.035 | 0.0082 | 0.0024 |
| レンダ PSNR(view 0/15/29) | 14.6 / 15.1 / 14.7 | 20.7 / 20.1 / 20.8 | 25.4 / 22.9 / 26.1 dB |
| gaussians | 60k | 200k | 220k(適応増加) |
| iter | 1500 | 1500 | 3000 |
共通: 入力 30 views(2448×2048, fl_x≈1453)/ GPU / gsplat 1.5.3。
- LiDAR-primed init(設計の核)で +5.5dB。
build_lidar_init.pyが bag のスキャンを SLAM 軌跡で world 系に蓄積(151 scans → voxel 0.05 → 200k 点)し、train_gsplat.py --init-plyが Gaussian 位置(+色)を seed。COLMAP SfM 不要で メートル単位の幾何事前が入る。 - densification(
--densify, gsplatDefaultStrategy)でさらに +4.3dB。 adaptive density control で Gaussian を増減し細部を鮮鋭化。最終 PSNR ~24.8dB、 render は太陽光パネル列・建物エッジ・橙色フレームまで GT にほぼ一致。 ※短い run では opacity reset が逆効果なのでreset_everyを無効化している。
random → LiDAR-primed → densify で PSNR 15 → 20.5 → 24.8dB、設計の方向性が
実データで裏付けられた。さらに SH deg1 + 学習 iter を 9000〜15000 に伸ばすと 25.2〜25.5dB
まで到達する(当初 ~24dB を上限と見ていたが一部は under-training だった、
3dgs-sh-degree-notes.md)。再現スクリプトの既定もこのベスト構成(SH deg1 / iter 9000)。
extrinsic 自己校正の検証(負の結果)
「近似 extrinsic が残ブラーの主因」という仮説を検証するため、train_gsplat.py
--optimize-extrinsic を実装した。extrinsic 誤差は全カメラ共通の単一 6-DoF rigid
補正(c2w_true = c2w_approx @ Δ)なので、学習可能な SE(3) 補正を gaussian と同時に
photometric 最適化すれば lever-arm/回転を復元できる(photometric BA)。
結果: 復元された補正は回転 ~0.24°・並進 z ~10cm と微小で、refined-pose 評価の PSNR は ~24dB と densify-only と同等(向上なし)。 → koide のフレーム規約 extrinsic は既にほぼ最適で、残ブラーの主因ではなかった。 self-cal 機能自体は extrinsic が未知/不良な bag で有用なので残すが、koide では デフォルト無効。
さらなる改善レバー(効果順、更新)
- 視点数・系列長 — 30 views / 15s 単一セグメントが実質の上限要因。複数 koide
セグメント結合や長い軌跡で view を増やすのが最も効くと推定。→ 別データ(isuzu 640views)で
検証したが視点増では破れず(
3dgs-isuzu-viewcount-notes.md)。pose 一貫性が本丸。 - frontend-only odometry のドリフト — graph backend OFF。backend ON / ループ補正。
- 損失関数 — ~~現状 MSE のみ~~ → 実装済み(下記 §知覚レバー)。INRIA 標準
L1+D-SSIM を
--ssim-lambda(既定 0.2)で追加。 - scale init — ~~一様スケール~~ → 実装済み。
--knn-scale-initで点群の局所 密度(k-NN 間隔)から per-Gaussian スケールを seed。 - LiDAR init の色付け — ~~位置のみ seed~~ → 実装済み(
build_lidar_init.py --color-transforms、画像投影で点群を着色)。ただし品質は中立: koide で 3000iter 23.6dB(位置のみ 23.8dB と同等)、500iter でも差なし。色は LR が高く <100iter で学習 され、早期は densification が律速のため init 色は冗長。機能は検査用/非 densify/下流 用途に残すが、PSNR レバーとしては効かない。 - 長 run(iter 増)。
(extrinsic は §上記のとおり koide では頭打ち。他データセットでは効く可能性あり。)
知覚レバー(SSIM 損失 + k-NN scale init)の A/B(2026-06-06)
同条件(densify 3000 iter、LiDAR-primed init、学習ビュー評価)で損失と init を変えて計測。
PSNR/SSIM は train_gsplat.py が学習終了時に全ビューで算出。
| 条件 | 損失 | scale init | PSNR | SSIM | gaussians |
|---|---|---|---|---|---|
| A | MSE のみ(旧既定) | 一様 | 24.29 dB | 0.8123 | 220k |
| B | L1+D-SSIM (λ=0.2) | 一様 | 23.79 dB | 0.8412 | 370k |
| C | L1+D-SSIM (λ=0.2) | k-NN | 23.77 dB | 0.8435 | 360k |
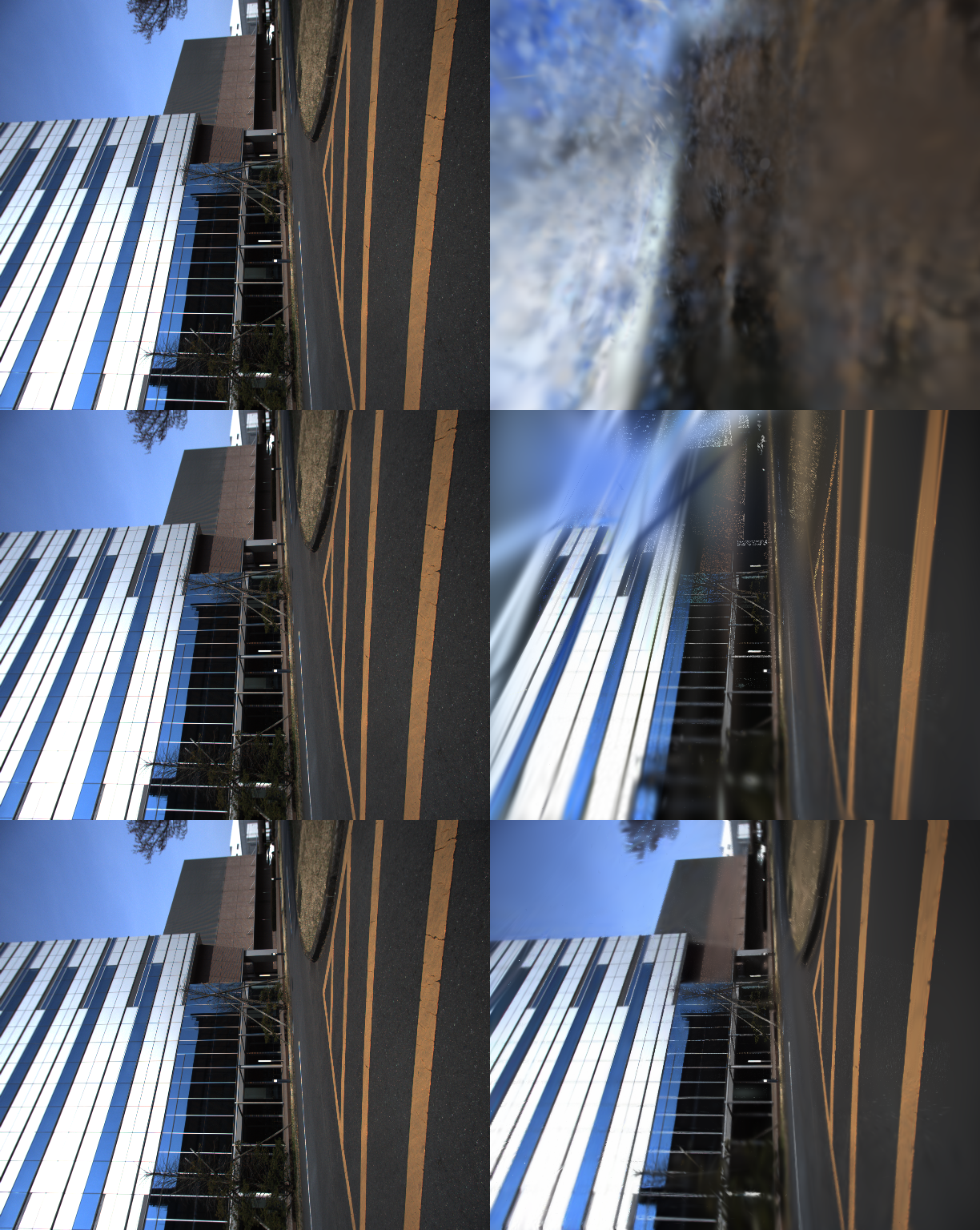
- SSIM 損失で構造類似度 +0.029(k-NN init で更に +0.0023、計 +0.031)。エッジ・
パネル列のシャープネスが上がる(
assets/3dgs_koide_ssim_compare.png、列は GT | MSE | SSIM)。 - 代償は PSNR -0.5dB。MSE は PSNR を直接最適化するため当然で、SSIM はそれと トレードオフ。PSNR の ~25dB 上限は破れない= data-bound(30 視点・単一短セグメント)。
- 結論: SSIM 損失は標準 INRIA loss なので既定採用(知覚品質が上がる)。k-NN init は 原理的に正しいが効果は限界的なので opt-in。上限突破には依然「視点数・系列長」が本丸。
わかったこと(実運用の知見)
- LiDAR とカメラがセンサ内蔵クロックの別基準だった(header stamp が ~21.9s ずれ)。
bag 受信時刻で skew を相殺する
--time-offset autoを実装して解決。同種の Livox+cam bag で再利用可能。 cv_bridgeは当環境の numpy 2.4.4 で ImportError。sensor_msgs/Imageを numpy 生 復号(decode_image)して回避済み。
次アクション
- (A)
train_gsplatに LiDAR-primed init(pointcloud_map / scan 点群からの Gaussian 初期化)と densification を追加 → 品質の本丸。 - (B) koide の 正規 extrinsic(direct_visual_lidar_calibration)を入れて再評価。
- (C) NTU VIRAL(ステレオ + GT)で pose 品質と 3DGS 品質の相関を見る(設計 doc M2)。