lidarslam_ros2 Docs
Pointcloud-map authoring, benchmark evidence, and browser-first map proof.
lidarslam_ros2 is organized around a practical public path:
build a pointcloud map, validate it, and open it through
Autoware-compatible map workflows.
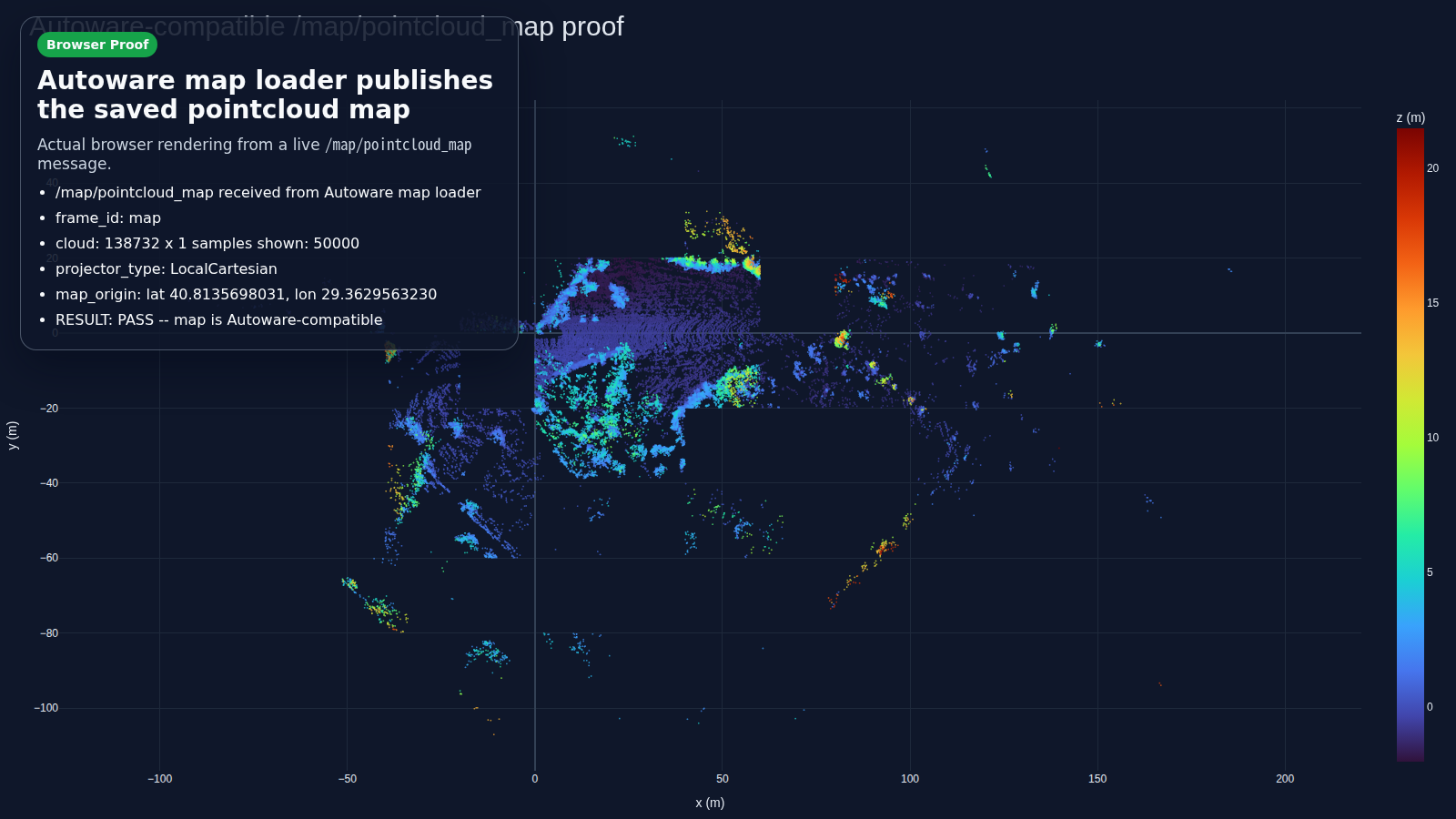
Autoware-compatible proof
The public flow publishes a live /map/pointcloud_map,
writes map_projector_info.yaml, and keeps map verification
in the documented path.
Map cleanup with evidence
Save-time dynamic filtering reduces map size while preserving coarse footprint overlap. The validation reports track both reduction and tile overlap.

Start Here
Getting Started
Choose Docker, a local build, or your own bag without reading every workflow first.
Product Contract
Know the supported inputs, outputs, entrypoints, and explicit non-goals.
Autoware-Compatible Map Authoring
The shortest product-level summary of the supported public path.
Autoware Quickstart
Go from bag preflight to verified pointcloud-map output.
Autoware Foxglove
Open the map loader output in a browser-first viewer path.
Operations
Operator Workflows
Required topics, optional GNSS, packet paths, and map-save flows.
Benchmarking And Release Gate
Run the tracked benchmark suite and generate the published reports.
Comparison
See the current public position and benchmark-backed configuration summary.
Current Snapshot
| Area | Current public position |
|---|---|
| Main path | RKO-LIO + graph_based_slam |
| Public map output | pointcloud_map/ + map_projector_info.yaml |
| Browser proof | Foxglove path documented and smoke-tested |
| Long-loop evidence | MID360 |
| Ground-truth benchmark | NTU VIRAL tnp_01 |
| Save-time cleanup | dynamic filter with cross-dataset validation |
Releases
Project
Local Preview
Build the docs:
python3 -m mkdocs build --strict
Serve them locally:
python3 -m mkdocs serve